This blog post demonstrates how to plot FLEXPART model trajectories on a 3D terrain map, integrating topography and transport data for enhanced visualization. The workflow includes:
- Loading terrain data
- Plotting air mass trajectories in 3D
- Creating illustrative particle dispersion effects
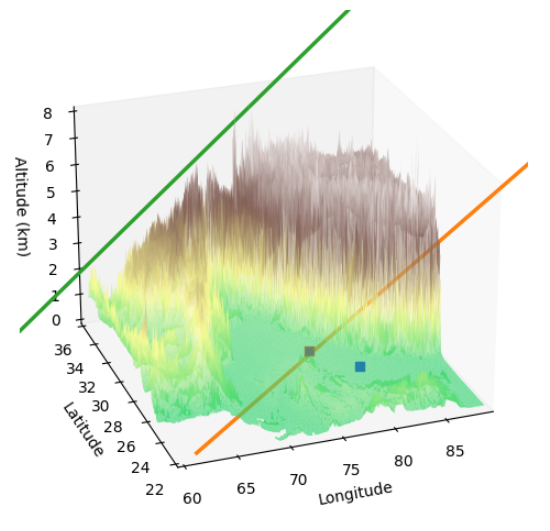
1. Load and Visualize Terrain Data
1 | import numpy as np |
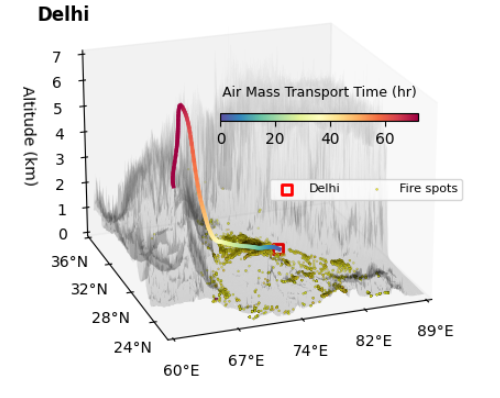
2. Load and Plot FLEXPART Trajectories
In trajectory mode, the output txt format information can be seen here
https://confluence.ecmwf.int/display/METV/FLEXPART+output
| Column Number | Name | Unit | Description |
|---|---|---|---|
| 1 | time | s | The elapsed time in seconds since the middle point of the release interval |
| 2 | meanLon | degrees | Mean longitude position for all the particles |
| 3 | meanLat | degrees | Mean latitude position for all the particles |
| 4 | meanZ | m | Mean height for all the particles (above sea level) |
| 5 | meanTopo | m | Mean topography underlying all the particles |
| 6 | meanPBL | m | Mean PBL (Planetary Boundary Layer) height for all the particles (above ground level) |
| 7 | meanTropo | m | Mean tropopause height at the positions of particles (above sea level) |
| 8 | meanPv | PVU | Mean potential vorticity for all the particles |
| 9 | rmsHBefore | km | Total horizontal RMS (root mean square) distance before clustering |
| 10 | rmsHAfter | km | Total horizontal RMS distance after clustering |
| 11 | rmsVBefore | m | Total vertical RMS distance before clustering |
| 12 | rmsVAfter | m | Total vertical RMS distance after clustering |
| 13 | pblFract | % | Fraction of particles in the PBL |
| 14 | pv2Fract | % | Fraction of particles with PV < 2 PVU |
| 15 | tropoFract | % | Fraction of particles within the troposphere |
| 16* | clLon_N | degrees | Mean longitude position for all the particles in cluster N |
| 17* | clLat_N | degrees | Mean latitude position for all the particles in cluster N |
| 18* | clZ_N | m | Mean height for all the particles in cluster N (above sea level) |
| 19* | clFract_N | % | Fraction of particles in cluster N (above sea level) |
| 20* | clRms_N | km | Total horizontal RMS distance in cluster N |
1 | input_file = "./data/retroplume_raw/traj/clustered_ind/2018-03-30-example.txt" |
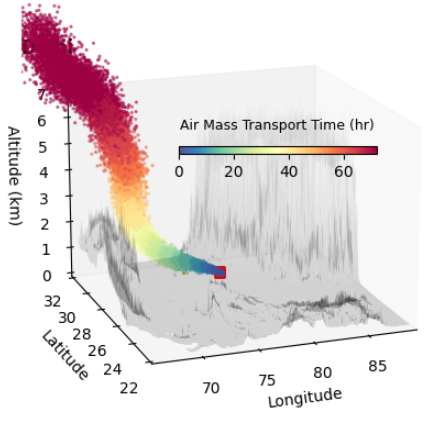
3.Particle Dispersion Illustration
1 | import numpy as np |
Comments